1. 极致精度,行业领先:依托红外双目视觉与自研算法,稳定实现0.1mm级精度,满足精密智造需求,对标进口高端设备。
2. 被动结构,稳定耐用:无电子元器件,抗粉尘、震动与杂光,适配车间恶劣工况,故障率低,降低运维成本。
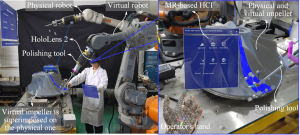
3. 零门槛操作,高效提效:无需编程基础,手动描摹即可生成轨迹,示教效率提升5-10倍,缩短产线调试与换型周期。
4. 全机型兼容,适配广泛:无缝对接主流机器人,支持新旧产线改造,无需更换现有设备,落地成本低。
5. 自研技术,高性价比:核心软硬件自主研发,无海外专利与订阅成本,适合大中小企业批量落地。