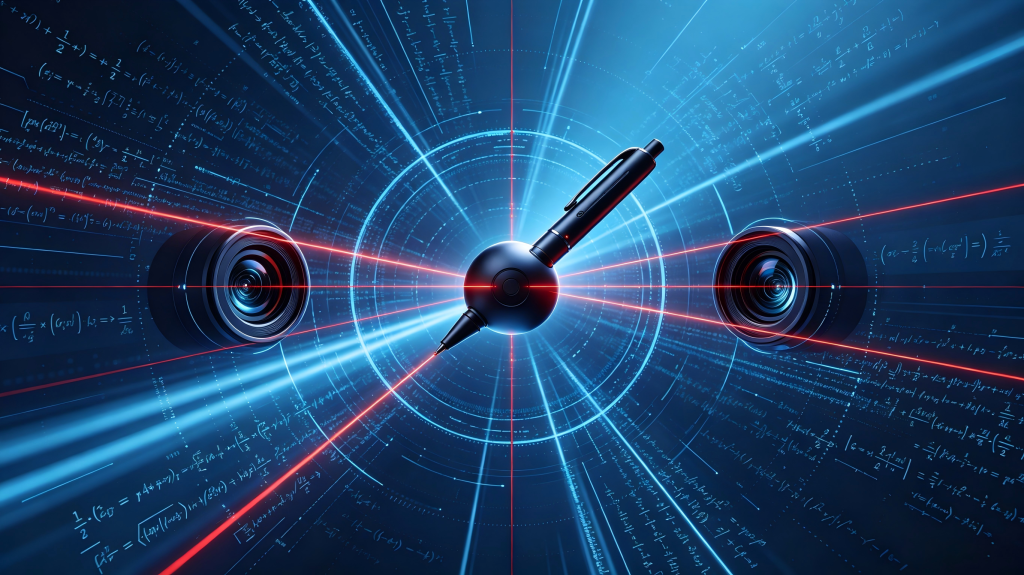
- 被动定位球采集结构:顶端搭载高适配被动定位球,依靠高反光材质反射红外光源,规避主动模块短板,结构极简、耐用免维护,适配工业复杂工况。
- 红外光学精准感知:系统发射特定波段红外光,实时追踪锁定定位球,不受车间杂光干扰,精准捕捉笔头三维坐标与轨迹,保障采集连续性。
- 双目相机立体解算:搭载高清双目工业相机,基于视差成像原理采集动态影像,通过自研算法还原轨迹、修正误差,稳定实现0.1mm级精度,远超传统示教标准。
整套架构以“被动采集+光学感知+视觉解算”为核心,兼顾高精度、高稳定性、低成本、易操作四大优势,适配全品类工业及协作机器人。