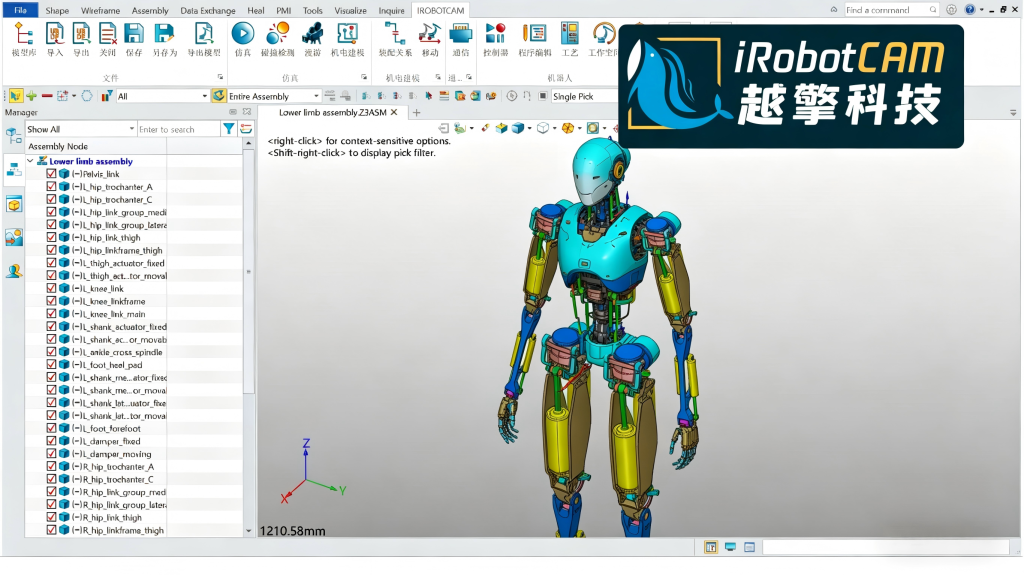
基于机器人运动学,iRobotCAM具身智能设计与仿真软件满足灵巧手,人形机器人,四足机器狗,特种机器人等具身智能体的设计与仿真;全面支持串联机器人与并联机器人的设计,支持URDF输出与MuJoCo XML输出,并支持MuJoCo, ISAAC SIM等各类仿真软件与训练软件的应用。
- 开放的数据导入与导出
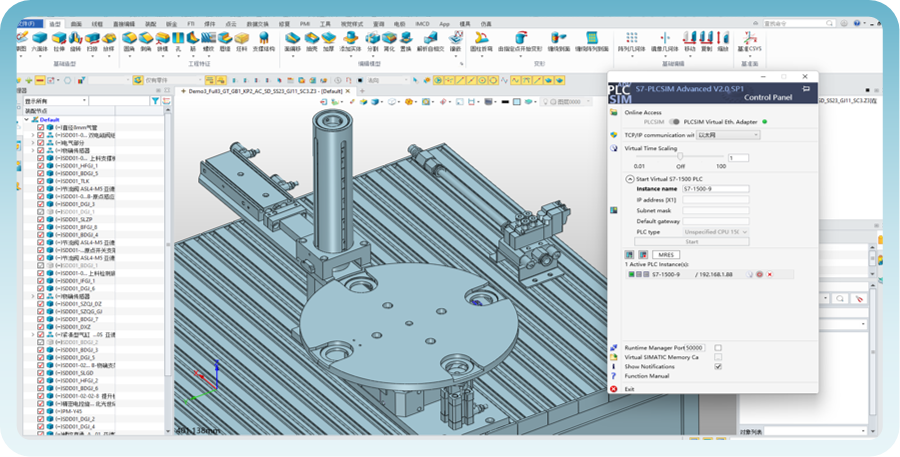
- iRobotCAM基于三维几何内核的技术架构,可以导入来自于各个三维软件的包括Catia, Solidworks, NX, Creo, Inventor等数据格式;
- 支持URDF导入或导出,通过导入URDF,机器人可进行针对性的修改,校正设计错误; 通过导出URDF,可将包括关节,惯量等参数的导出,方便ROS系统等机器人系统或仿真训练软件的使用
- 机器人机电设计
- 支持设置每个零件的材料属性,计算惯量等物理特性。
- 支持刚体的创建,并精简网格数据;
- 支持碰撞体的创建,以凸包或凸分解创建碰撞体
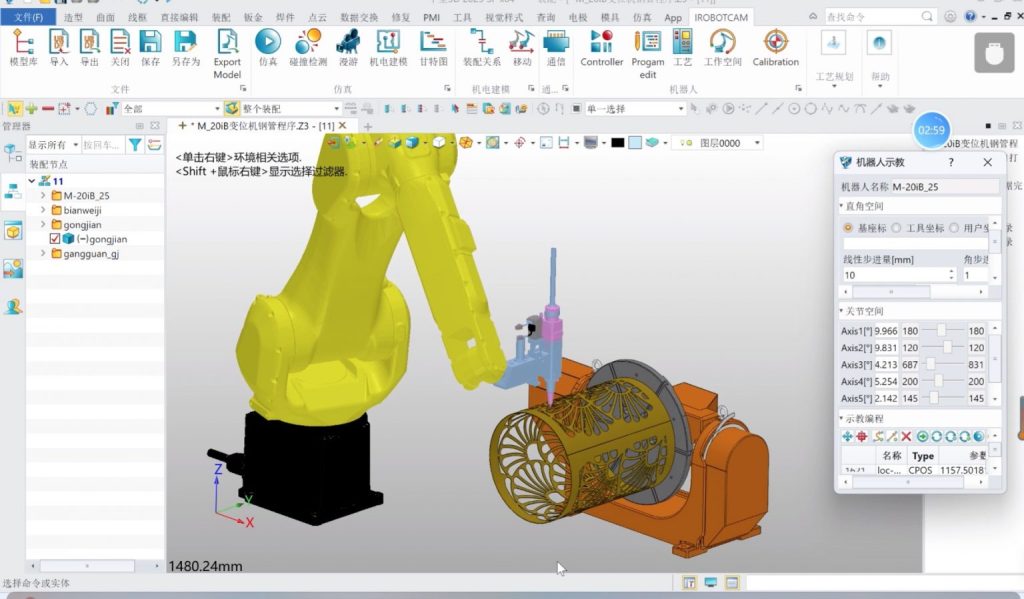
- 支持运动副的创建,支持动力学,运动学或被动等运动类型
- 支持运动组的创建
- 具身智能机器人的生成
- 利用便捷的骨架式的机器人关节设计面板,可以将机器人的所有关节机构的关联起来,形成完整的具身智能通用机器人;
- 支持串联机器人的设计,并联机器人等各类应用场景的机器人的设计。
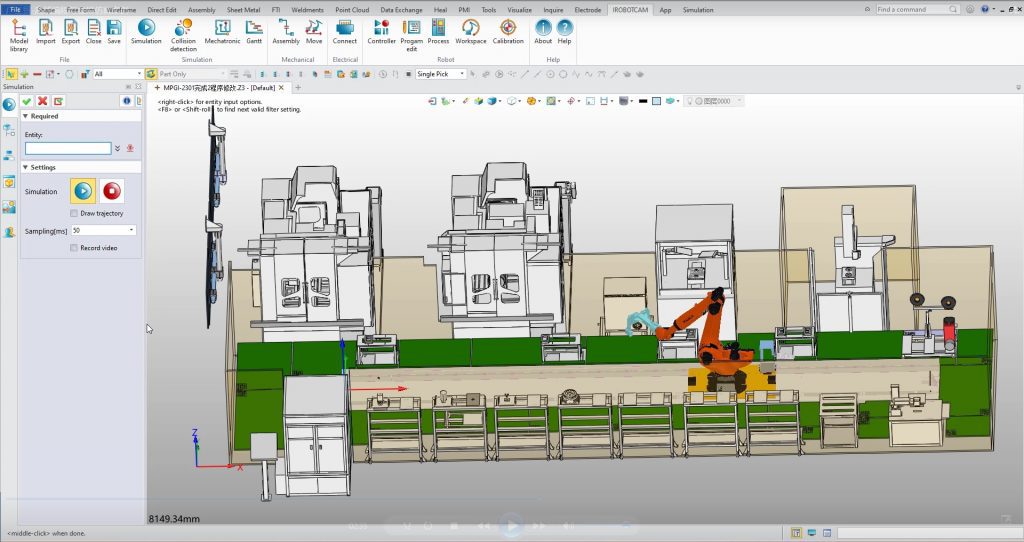
- 机器人的仿真
- 面向具身智能机器人的仿真训练,iRobotCAM为各种复杂特种机器人提供通用的具身智能仿真能力 提供开放的集成接口, 满足各类特种场景机器人的算法接入与训练需求;
- 利用iRobotCAM便捷的URDF导入与导出功能,通过生成通用的 URDF 文件或MuJoCo XML,无缝对接MuJoCo、Simbody、OpenSim , Isaac sim等主流物理引擎仿真需求。