Skip to content
东零西壹
机器人空间轨迹生成技术研发与推广
首页
产品
机器人轨迹定位笔
六自由度力反馈器
案例
轨迹笔与离线编程
力反馈遥操作
关于公司
联系我们
东零西壹
机器人空间轨迹生成技术研发与推广
Navigation Menu
Navigation Menu
首页
产品
机器人轨迹定位笔
六自由度力反馈器
案例
轨迹笔与离线编程
力反馈遥操作
关于公司
联系我们
六自由度力反馈应用案例
六自由度力反馈器应用案例
六自由度力反馈器工作流程
根据六自由度力反馈器的核心技术参数,选择硬件的对接方案
六自由度力反馈器的持续力为12N,可确认是否满足协作机器人的力反馈大小需求
六自由度力反馈器提供X,Y,Z三个方向的力,最小位移精度0.01mm,旋转精度0.004度,可进一步确认是否满足细微力的操作需求
六自由度力反馈器提供4k Hz的刷新率,满足低至0.25 ms的延迟,可根据本身协作机器人的延迟需求,进一步确认采取的刷新频率率,一般情况下,协作机器人仅要求1ms或以下的刷新。
根据SDK的集成需求,可以选择六自由度的SDK版本,包括Windows, Linux, Unity3D等版本的选择
接口集成后,根据协作机器人等硬件能力调整力反馈器的操作速度,一般情况下,工业机器人的精度等远在六自由度力反馈器之下,需要根据工业机器人的硬件能力调节适配的参数即可
更多客户应用案例
公司新闻
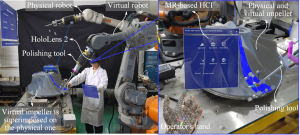
东零西壹发布混合现实轨迹示教技术,兼容Hololens,HTCVive,VisionPro等MR设备
机器人的示教编程主要是通过拖动工业机器人来实现示教
Read More »
获取更多机器人定位轨迹笔信息
联络我们